
En este proyecto de tecnología para secundaria o proyecto escolar, te mostramos cómo construir un sistema de puerta automática usando pocos componentes. Aprenderás a:
- Controlar el giro para un motor DC construyendo tu propio puente H con 2 relés.
- Integrar un sensor de movimiento PIR (HC-SR501) para activar el sistema automáticamente.
- Cómo usar interruptores de fin de carrera, como límites de seguridad para el movimiento de la puerta.
Este proyecto puede ser el primer paso hacia el fascinante mundo de la automatización, donde electrónica y creatividad se unen para simplificar tareas cotidianas. Aunque en el siguiente video se muestra el paso a paso del proyecto, el artículo tiene información adicional y complementaria que es importante leer.
Componentes electrónicos
En este proyecto de tecnología para secundaria, se requieren los siguientes componentes electrónicos:
- Dos relés o relevadores SPDT de 5v.
- Dos interruptores de fin de carrera..
- Sensor PIR HC-SR501..
- Diodo 1N4007..
- Transistor 2N2222..
- Resistencia de 1k..
- Motorreductor.
- Sistema de piñón y cadena.
- Fuente de 5 voltios.
Descripción de los componentes electrónicos
Relés o relevadores SPDT
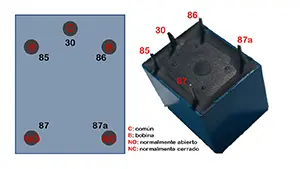
Un relé SPDT (Single Pole Double Throw) es un interruptor electromagnético de 5 pines controlado por una bobina. «SPDT» significa que tiene un polo común que conmuta entre dos posiciones: un contacto normalmente cerrado NC y otro normalmente abierto NO. La denominación de los pines se hace según el estándar DIN 72552, de la siguiente manera:
- Pines 85 y 86: Extremos de la bobina. Al aplicar voltaje, generan un campo magnético.
- 30 (COM): Entrada común de la carga a controlar.
- 87a (NC): Contacto cerrado cuando el relé está inactivo.
- 87 (NO): Contacto cerrado solo cuando el relé se activa.
Cuando se dice que el relé es de 5 voltios, se está especificando el voltaje necesario para energizar su bobina.
Interruptores de fin de carrera

Los interruptores de Fin de Carrera Son sensores mecánicos que detectan, por contacto, la presencia o el límite físico de un objeto. Se activan o desactivan al ser presionados por una pieza en movimiento. En consecuencia, sirven para limitar el movimiento, detectar posiciones específicas o como medidas de seguridad en máquinas. Generalmente, tienen 3 pines o contactos: común C, normalmente abierto NO y normalmente cerrado NC. En el caso de nuestra puerta automática, se usa el común y el normalmente cerrado NC. Por tanto, se abre y corta la energía cuando la puerta lo presiona.
Sensor PIR HC-SR501

Un sensor infrarrojo pasivo (PIR) que detecta movimiento mediante cambios en la radiación térmica. Ideal para proyectos de automatización donde se requiera detección de movimiento simple y eficiente. Las características de este sensor son:
- Rango de detección: Hasta 3 a 7 metros (ajustable).
- Ángulo de detección: 120°.
- Voltaje de operación: 5V-12V DC.
- Salida: Señal digital (3.3V o 5V) al detectar movimiento.
- Duración de la señal de salida: de 0.3 segundos a 5 minutos (ajustable)
- Fácil integración (solo 3 pines: VCC, OUT, GND).
- Bajo costo y ampliamente disponible.
Diodo 1N4007

Un diodo es un componente semiconductor que actúa como una «válvula unidireccional» para la corriente eléctrica. Permite el flujo de corriente en un solo sentido (del ánodo al cátodo) y lo bloquea en el inverso. Se usa, por ejemplo, para convertir corriente alterna (AC) a continua (DC). (Esto fue descubierto por el físico Ferdinand Braun). En relación con los relés, el diodo 1N4007 se conecta en antiparalelo con la bobina, para proteger otros componentes del circuito (el transistor, por ejemplo).
Transistor 2N2222
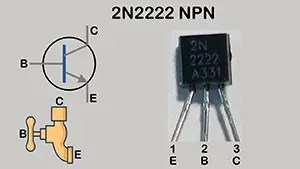
El 2N2222 es un transistor NPN de propósito general, hecho de silicio. Es uno de los más populares por su versatilidad y bajo costo. Es del tipo NPN (Requiere una corriente positiva en la base para activarse) y sus pines son:
- 1 – Emisor (E): Salida de la corriente principal, generalmente conectada a GND.
- 2 – Base (B): Terminal de control. Una pequeña corriente aquí activa el flujo entre Colector y Emisor.
- 3 – Colector (C): Entrada de la corriente principal, conectada a la carga.
Gracias a su alta conmutación, enciende y apaga las bobinas de los relés, controlando así el motor de la puerta.
Resistencia de 1kΩ (1000 Ohmios)

Un componente electrónico pasivo cuya función principal es limitar el flujo de energía en un circuito. Por tanto, se usa, entre otras cosas, para prevenir daños en otros componentes. En nuestro circuito, la resistencia previene el daño del transistor. El valor de 1k (kilo-ohmio) equivale a 1000 ohmios. Se identifica con el Código de colores Marrón – Negro – Rojo.
Motorreductor (Modelo Amarillo 1:48)

Es un motor de corriente continua combinado con un sistema de engranajes que reducen la velocidad de giro del eje, pero aumenta su fuerza (torque). La relación 1:48 significa que el motor gira 48 veces por cada vuelta del eje de salida. En otras palabras, permite un movimiento lento pero potente. Esto permite que la puerta abra y cierre de manera lenta y elegante sin dar sobresaltos. Este componente ya lo hemos descrito en el experimento de la ley de Faraday.
Sistema Piñón-Cadena: Transformando Movimiento

Es un mecanismo que convierte el movimiento rotacional del motorreductor en movimiento lineal de la puerta. Consiste en un piñón acoplado al eje del motor y una cadena dentada que se desplaza de forma sincronizada con el giro del piñón. Según la relación entre velocidad tangencial y velocidad angular, un piñón de radio pequeño reduce la velocidad lineal de la cadena, priorizando precisión sobre velocidad.
Por tal razón, para este proyecto de tecnología para secundaria, se recomienda combinar un motorreductor con un piñón pequeño.
Circuito de este proyecto de tecnología para secundaria
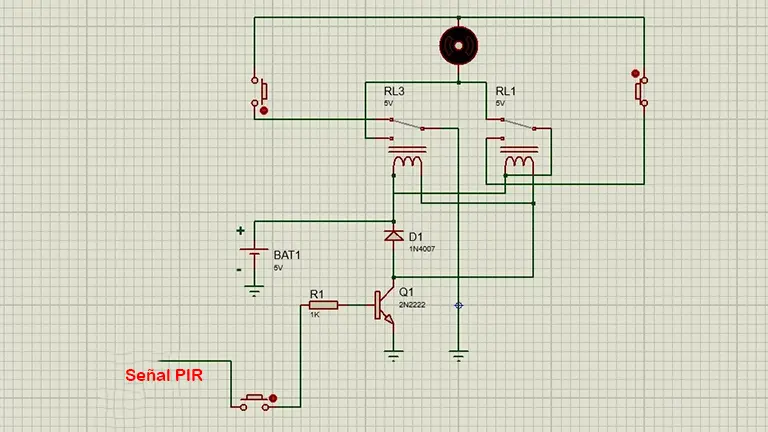
Cuando el sensor PIR HC-SR501 detecta movimiento, envía 3.3 voltios a la base del transistor 2N2222 a través de una resistencia de 1k. Esto permite que la corriente fluya desde el colector hacia el emisor hasta negativo activando los relés. En consecuencia, el motor se mueve y la puerta comienza a abrirse. Mientras se abre, el interruptor 1 se conecta y al llegar al tope, el interruptor 2 se desconecta, apagando el motor. La puerta permanece abierta mientras el sensor está activo. Cuando el sensor se desactiva, el motor invierte su giro, la puerta comienza a cerrarse. Como resultado, el interruptor 2 se conecta, y al llegar al final del recorrido, el interruptor 1 se desconecta, deteniendo la puerta. La puerta queda lista para un nuevo ciclo.
Construcción del circuito
Con los relés se controla el sentido de giro del motor. Un puente H es un circuito o dispositivo que controla el giro de un motor de corriente continua. Puede construirse con transistores o interruptores, aunque hay, en el mercado, circuitos integrados listos para este fin. Aquí construimos uno, aprovechando los interruptores internos de los relés.
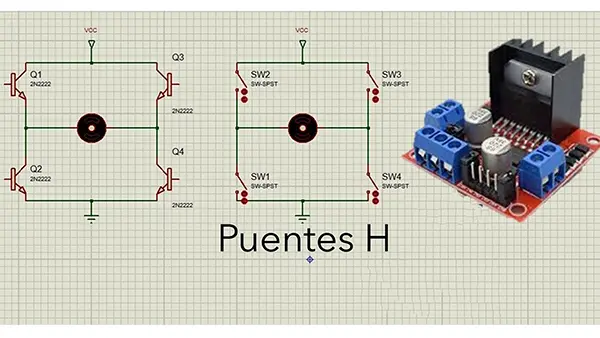
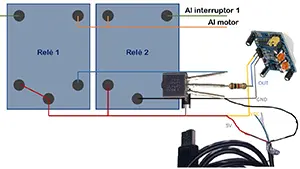
Puente H con 2 relés
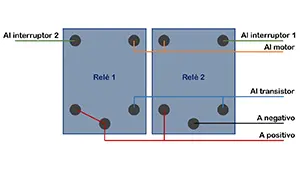
Para empezar, unimos los relés con cinta. Luego, con alambre de cobre, conectamos el extremo derecho de la bobina del Relé 1 con el extremo derecho del Relé 2, y de ahí un alambre al colector del transistor. Ahora, el extremo izquierdo de la bobina del Relé 1 va al contacto común del mismo relé, y al extremo izquierdo del Relé 2, dejando un cable que irá al positivo de la fuente. Después, el contacto común del Relé 2 se conecta al negativo.
Para conectar las salidas, conectamos el NC del Relé 1 con el NO del Relé 2, y de ahí sale un cable al motor. Los pines restantes (NC del Relé 1 y NO del Relé 2) van a los interruptores de fin de carrera. Con esto tenemos listo el control de giro (puente H).
Conexión de los demás componentes
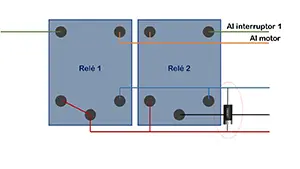
Conexión del diodo.
El diodo se conecta entre el alambre que va al colector del transistor y el positivo. Con la línea plateada hacia positivo.
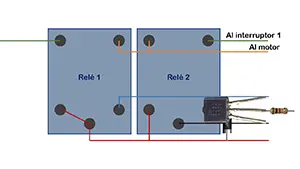
Conexión del transistor y la resistencia.
El colector del transistor (pin 3) se conecta al alambre destinado para ello y el emisor (pin 1) se conecta a negativo. Al pin central o base, se conecta la resistencia de 1k.
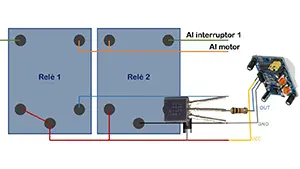
Conxión del sensor PIR.
El sensor PIR HC-SR501 tiene 3 pines. El pin VCC o voltaje de alimentación se conecta a positivo. El pin central OUT, se conecta a la resistencia y el pin GND va a negativo.
Conexión de la fuente de alimentación.
Para alimentar el circuito con 5v usando un cargador de celular, se corta un cable de carga cerca del terminal micro USB. Al quitar la cubierta, se encuentran 4 cables. El cable rojo se conecta a positivo y el negro a negativo. Los otros 2 se dejan desconectados.
Conexión de los interruptores de fin de carrera.
Terminamos de armar el circuito conectando los interruptores de fin de carrera. Los cables que vienen de las salidas laterales de los relés, se conectan al pin común de cada interruptor. y al pin normalmente cerrado, se conectan cables que van al motor. Con esto tenemos el circuito listo para montarlo en la puerta.
Conexión del motor
Para conectar el motor, se conecta el cable central que une las dos salidas de los relés a un contacto del motor sin soldar todavía. Luego, se unen los 2 cables que vienen de los interruptores y se conectan al otro contacto del motor y se energiza el circuito. Al energizar, se activa el sensor y la puerta se abre. Si esto no ocurre, invierta los cables. La puerta debe abrirse y detener el motor al llegar a tope activando el interruptor. Una vez identificadas las conexiones, suelde el primer cable al contacto del motor y los dos interruptores al otro contacto. Hemos terminado y podemos hacer las pruebas.
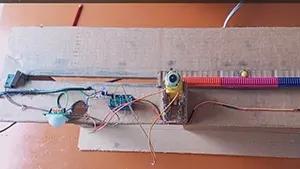
Presentación final de este proyecto de tecnología para secundaria


La construcción de la puerta depende de los materiales disponibles y de la creatividad de cada uno. En este proyecto de tecnología para secundaria (puerta automática), por ejemplo, está hecha de cartón. Tiene dos láminas de 16cm por 55cm, tanto en la base como en la parte superior. En la parte superior tiene una ranura de 1cm por 46cm, para encajar la puerta. La altura es de 30cm y la parte abierta es de 22cm. La puerta propiamente dicha es de 24cm por 30cm. En la parte superior lleva una pieza de 3cm, que la sostiene sobre la lámina superior y facilita su deslizamiento, además, en esta pieza se pega la cadena que engrana con el piñón en el eje del motor.
Anímate a realizar tu propio proyecto, Si tienes dudas o preguntas, puedes plantearlas en la descripción del video.