
Las magnitudes físicas son números o conjuntos de números, que se utilizan para describir cuantitativamente un fenómeno físico. Sin embargo, algunas magnitudes físicas presentan características diferentes de otras y, por lo tanto, se les da un tratamiento matemático diferente.
Las principales clases de magnitudes físicas son: magnitudes o cantidades escalares y magnitudes o cantidades vectoriales.
Clases de magnitudes físicas
Magnitudes escalares
Una magnitud escalar es aquella que queda completamente definida o comprendida, cuando se especifica su valor numérico (o módulo) y su unidad de medida. Por lo general, estamos acostumbrados a utilizar este tipo de magnitudes en la vida cotidiana. Por ejemplo, la estatura de una persona es 1,7 metros. El valor numérico o módulo es 1,7 y la unidad de medida es metros. Con estos dos datos queda claro cuál es la altura de la persona. Del mismo modo, se pueden citar otros ejemplos. El volumen de un tanque de agua es 1000 litros. La temperatura de una persona es 37 grados centígrados. El área de una casa es 300 metros cuadrados.
Magnitudes vectoriales
Una magnitud vectorial es aquella que queda completamente definida o comprendida, cuando se especifica su valor numérico (o módulo), su unidad de medida y. además, su dirección y sentido. En la vida diaria se pueden encontrar ejemplos de este tipo de magnitud. Por ejemplo, si una persona pregunta dónde está el aeropuerto y usted responde a 2 kilómetros, seguramente esa información no es suficiente. Entonces, es necesario decir, por ejemplo, 2 kilómetros hacia el norte. De esta manera se aclara la dirección y sentido en que la persona se debe desplazar. Esta es una magnitud vectorial. Josiah Willard Gibbs desarrolló el análisis vectorial.
Representación de una cantidad vectorial
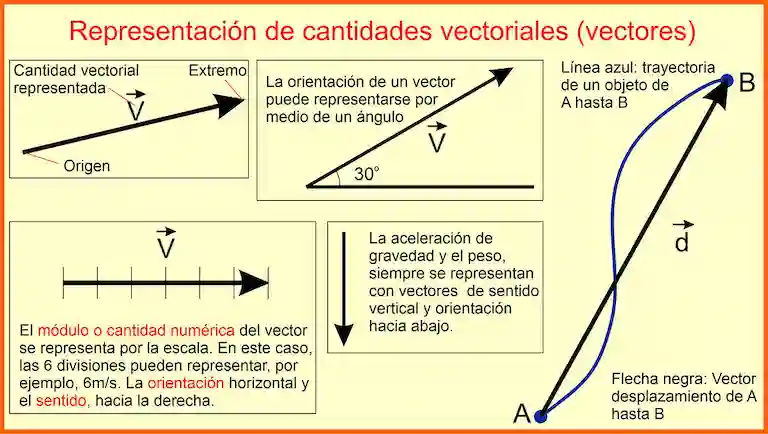
Una cantidad vectorial se representa, geométricamente, por medio de una flecha (figura 1). Su longitud, a la escala apropiada, representa el módulo o valor numérico. Además, su dirección corresponde a la del segmento y el sentido está indicado por la punta de la flecha. También, se usan letras coronadas por una flecha en la notación. La representación de una cantidad vectorial se llama vector.
Como ejemplos de magnitudes vectoriales se pueden citar el desplazamiento, la fuerza, la velocidad, la aceleración y el campo eléctrico.
Una de las características de las cantidades vectoriales, es que se operan geométricamente. Es decir, no es suficiente, por ejemplo, sumar sus módulos.
Suma de vectores por el método de componentes rectangulares
El método analítico es una de las técnicas más usadas para sumar vectores. El vector que resulta de la suma de otros vectores, se llama vector resultante. Generalmente, se representa con (R).
Para sumar vectores por el método analítico se siguen cinco pasos.
1 – En un sistema de coordenadas rectangulares, se dibujan, en posición normal, los vectores a sumar. Un vector en posición normal, es aquel cuyo origen coincide con el origen del sistema de coordenadas (figura 2).
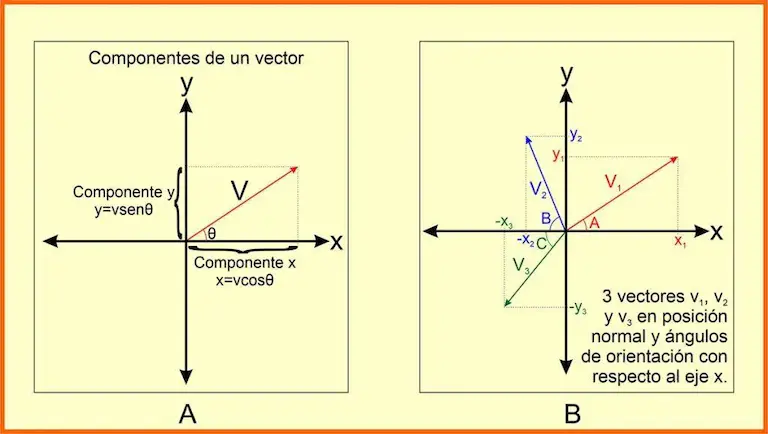
2 – Se hallan los componentes rectangulares de cada vector. El componente x, es la proyección del vector sobre el eje X. Del mismo modo, el componente y, es la proyección del vector sobre el eje y (figura 2A). La fórmula para el componente x es:
x = vcosθ
Donde v es el módulo del vector y θ es el ángulo de orientación.
Del mismo modo, la fórmula para el componente y es:
y = vsenθ
3 – Se hallan las sumatorias de x (suma de los componentes x Σx) y de y (suma de los componentes y Σy).
4 – Se calcula el módulo del vector resultante, con la fórmula:
5 – Para terminar, se halla el ángulo (β) de orientación del vector resultante. Para ello, se usa el inverso de la función tangente (tan-1) en la siguiente expresión:
Ejercicio resuelto de suma analítica de vectores
Sobre un cuerpo se aplican 3 fuerzas como muestra la figura 3B. la fuerza 1, correspondiente al vector (v1), es de 5 Newton y tiene un ángulo de 30°. Además, la fuerza 2, correspondiente al vector (v2), es de 4 Newton y con ángulo de 65° con respecto al eje x. Finalmente, la fuerza 3, correspondiente al vector (v3), tiene módulo de 3 Newton y 50° con respecto a x. Hallar el módulo de la fuerza resultante y el ángulo de orientación.
Solución:
Como la gráfica está dada, se puede empezar en el paso 2 (componentes de los vectores).
Primero, los componentes del vector (v1).
x1 = 5N × cos30° = 4.33N
y1 = 5N × sen30° = 2.5N
Segundo, los componentes del vector (v2)
x2 = 4N × cos65° = -1.69N
y2 = 4N × sen65° = 3.63N
Tercero, los componentes del vector (v3)
x3 = 3N × cos50° = -1.93N
y3 = 3N × sen50° = -2.3N
Siguiente paso: Sumatorias de x y de y.
Para empezar, sumatoria de componentes x (Σx).
Σx = 4.33 – 1.69 – 1.93 = 0.71N
A continuación, sumatoria de componentes y (Σy).
Σy = 2.5 + 3.63 – 2.3 = 3.83N
Después de eso. Se halla el módulo del vector resultante.

Finalmente, se halla el ángulo del vector resultante.
En resumen, el módulo del vector resultante es 3,9 Newton y su ángulo de orientación corresponde a 79,49 grados. Este vector resultante se puede dibujar en el mismo sistema de coordenadas, midiendo, lo mejor posible, su ángulo y magnitud.
Taller de lectura
- ¿Qué es una magnitud física?
- Copie la tabla que muestra las diferencias entre magnitudes escalares y vectoriales.
- Escriba la definición de magnitudes escalares y, además, algunos ejemplos.
- Escriba la definición de magnitudes vectoriales y, además, 5 ejemplos.
- ¿Cómo se representa una cantidad vectorial?
- ¿Qué es un vector?
- Copie la figura 2.
- Escriba los 5 pasos para sumar vectores por el método analítico.
- Copie, con el procedimiento, el ejercicio resuelto.